-
-
|
| .
|
|
|
|
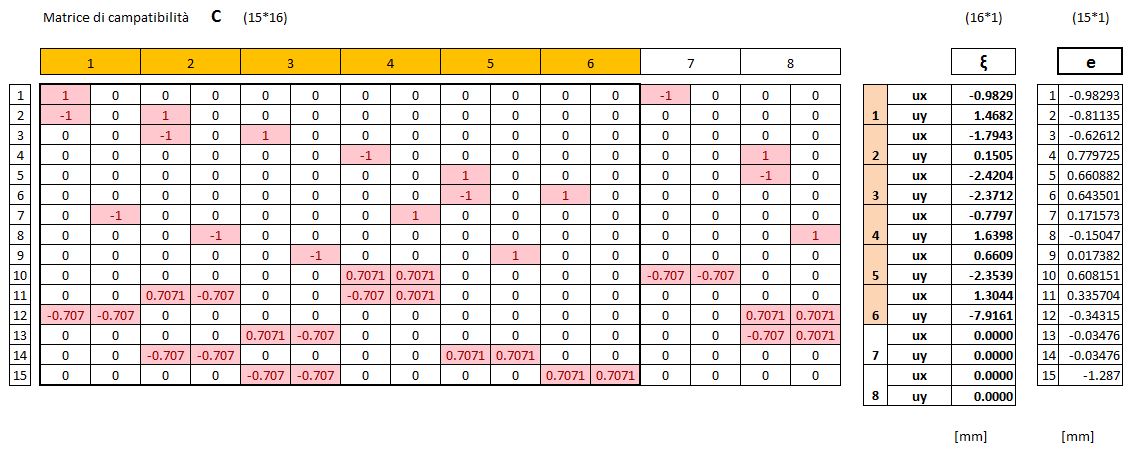
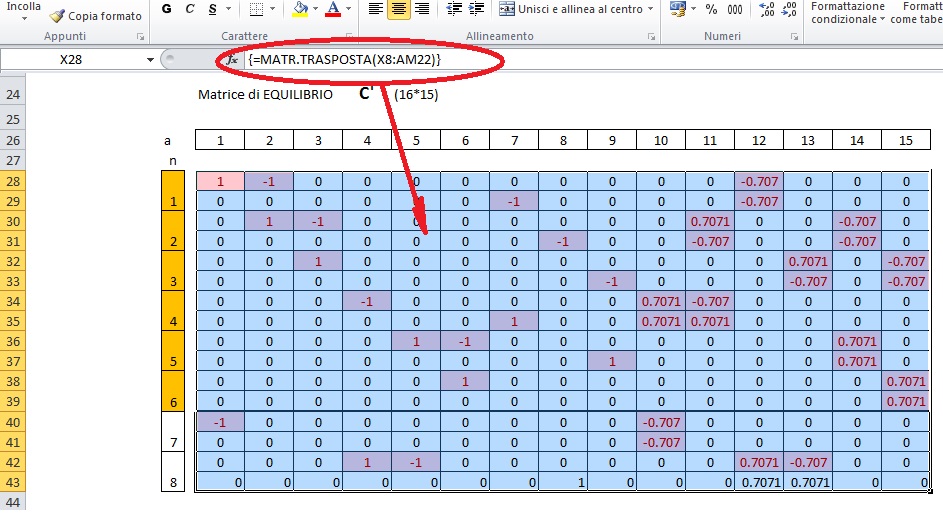
Avendo già costruito la matrice di compatibilità C, il passo per costruire quella di equilibrio è breve. Possiamo sfruttare le funzioni di Excel dedicate alla gestione delle matrici. Basta trasporre la precedente con la formula di matrice:
=MATR.TRASPOSTA(X8:AM22)
Ricordarsi che per introdurre una formula di matrice è necessario seguire i passi :
- selezionare una area del foglio delle dimensioni di righe pari alle colonne della matrice di origine e colonne pari alle righe della matrice di origine;
- spostarsi sulla barra di inserimento della formula;
- digitare la formula =MATR.TRASPOSTA(X8:AM22) ;
- premere contemporaneamente Shift+Ctrl+Invio e rilasciare.
Nella barra della formula essa apparirà entro una coppia di parentesi graffe. Questo indica, appunto, che si tratta di una matrice e la modifica di essa non può avvenire modificando una singola cella o una porzione della matrice, ma può avvenire modificando l'intera matrice.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
|
L'equazione Costitutiva-Elasticità.
Per l'applicazione del metodo risolutivo denominato metodo degli spostamenti, necessita ancora un ingrediente. L'equazione di elasticità.
Si ricorda che il metodo consiste nel partire da un sistema di spostamenti/deformazioni congruenti, e, attraverso la legge costitutiva, imporre la condizione di equilibrio al fine di ricavare, tra le infinite configurazioni congruenti, quell'unica configurazione che è anche equilibrata e che costituisce la soluzione del problema strutturale.
Indicando con

rispettivamente:
- dilatazione complessiva dell'asta
- dilatazione elastica dell'asta (dovuta all'elasticita dell'asta)
- dilatazione anelastica (dovuta per esempio a carichi termici o distorsioni localizzate o distribuite);
possiamo scrivere la relazione:

La quota elastica si esprime attraverso la matrice di elasticità:

in cui è:
la matrice quadrata diagonale di elasticità.
Il termine anelastico ea , nel caso di presenza di carico termico (che nelle travature reticolari può solo essere uniforme), dipende appunto da quest'ultimo.
per la generica asta, la dilatazione termica risulta:

e pertanto è necessario costruire una volta per tutte il vettore delle dilatazioni termiche
In definitiva la precedente relazione
Diviene:

ossia

La matrice

essendo quadrata e diagonale con termini diagonali non nulli, risulta invertibile.
Indicando con:

la matrice di rigidezza delle aste, premoltiplicando entrambi i membri dell'equazione precedete per D, si ottiene:

Qui occorre notare che il termine:

è il prodotto tra fattori noti (la rigidezza D e il vettore delle dilatazioni anelastiche) e pertanto possiamo determinarlo una volta per tutte dopo aver definito la matrice D. Tale fattore lo si indica con Na, pervenendo infine all'equazione costitutiva/elasticità:

Completo il breve sunto teorico riportando la matrice di rigidezza:
Edited by afazio - 18/9/2019, 21:08
|
|
|
| .
|
-
-
|
| .
|
|
|
|
prima di passare alla fase risolutiva per sottomatrici, costruiamo le ulteriori matrici/vettori definiti nella parte teorica.
Matrice di cedibilità delle aste e
matrice di rigidezza della aste.
La loro costruzione è abbastanza semplice. Il termine EA/L lo abbiamo determinato per ogni asta e lo troviamo nella tabella delle aste estesa.
Le due matrici sono diagonali di ordine (mxm) cioè 15x15 nel caso in esame, pertanto predisponiamo due tabelle di quindici righe e quindici colonne e inseriamo una semplice formula:
Se l'indice della riga è uguale all'indice della colonna allora inserisci il valore, altrimenti metti valore nullo.
Trascianiamo la formula facendo attenzione ai riferimenti relativi/assoluti e in un battibaleno abbiamo le due matrici in questione.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
|
Nelle tabelle allegate sono riportate le operazioni relative alla posizione:

E con questo abbiamo tutti gli ingredienti per poter passare alla risoluzione della travatura facendo ricorso alle matrici a blocchi.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
|
Le matrici a blochi
eravamo pervenuti all'equazione risolvente:

Eseguendo i prodotti vettoriali otteniamo una cosa del genere:

in cui la matrice di rigidezza K relativa all'intera travatura reticolare non risulta invertibile.
Se però pensiamo di partizionare la matrice K (e conseguentemente anche i vettori ξ e F') come nella figura mostrata, la sottomatrice K11 è invertibile e questo ci consente di ricavare gli spostamenti incogniti (spostamenti dei nodi liberi) e a cascata ricavare anche le dilatazioni e le sollecitazioni nelle aste, ed infine anche le reazioni vincolari.
Edited by afazio - 20/9/2019, 10:30
|
|
|
| .
|
-
-
|
| .
|
|
|
|
Abbiamo tutto per poter procedere.
nel foglio dove abbiamo scritto la matrice di rigidezza, invertiamone la sua sottomatrice K11
In un foglio a parte richiamiamo le due sottomatrici K-111 e K21 una sotto l'altra e accanto richiamiamo il vettore delle forze eq uivalenti nodali.
Eseguiamo i prodotti matriciali e ricaviamo sia gli spostamenti e sia le reazioni vincolari.
Nel foglio di servizio organizziamo i dati per far disegnare nello stesso diagramma anche la struttura deformata.
Otteniamo qualcosa che è sicuramente degno di essere presentato nel progetto dell'esame.
Volendo e non avendo voglia di complicarci la vita per far tracciare le etichette direttamente in excel, potremmo copiare l'immagine in paint e aggiungervi quel che vogliamo.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
|
In altro foglio che chiameremo "dilatazioni" richiamiamo la matrice di compatibilità C, vi mettiamo accanto il vettore degli spostameti ed eseguendo il prodotto matriciale ricaviamo il vettore delle dilatazioni.
Siamo quasi alla fine, resta da determinare solo il vettore degli sforzi normali sulle aste. Ma di questo ne parlo dopo aver predisposto nel grafico anche il tracciamento dei diagrammi sullo schema della struttura.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
|
Ecco infine l'ultimo passo.
La determinazione degli sforzi sulle aste e il tracciamento del diagramma degli sforzi normali.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
|
Riporto il confronto tra le sollecitazioni ricavate da joemcgal usando Telaio2D del prof Gelfi e quelle ricavate alla fine del processo che ho descritto:

Perfetti
|
|
|
| .
|
-
|
| .
|
|
|
|
Riassumendo:
Tabella di input dei nodi (coordinate, vincoli e forze nodali)

Tabella input delle aste (nodi di estremità, sezione , materiale e varizione termica)

Tabella di calcolo degli spostamenti e deformata:

Reazioni vincolari:

Sollecitazioni sulle aste:

E infine il file excel:
TravRet04
|
|
|
| .
|
-
|
| .
|
|
|
|
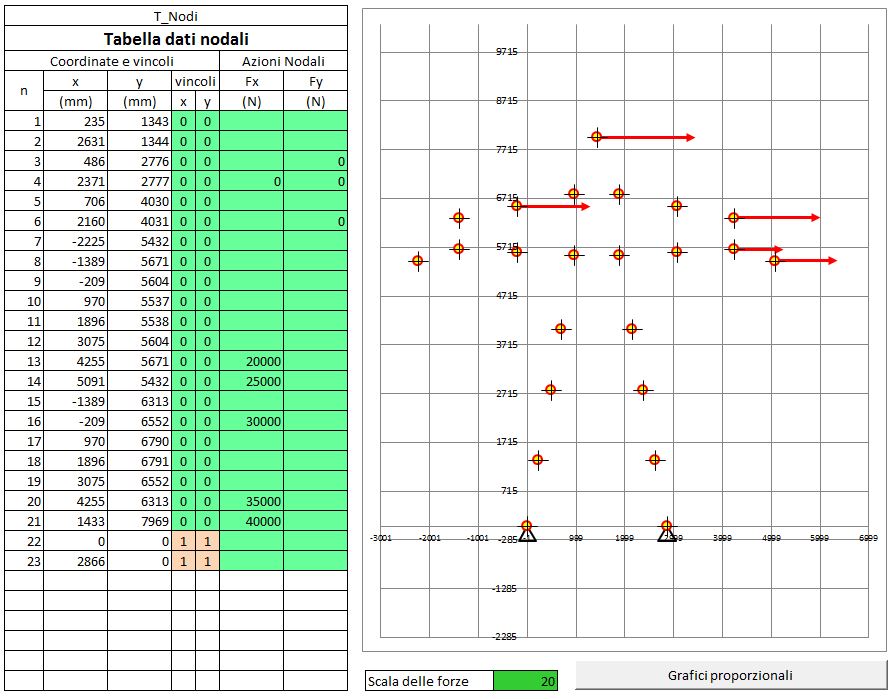
Ho provato ad adattare il foglio per risolvere una travatura appena un pò più complessa con un maggior numero di nodi e di aste, anche per capire quali potrebbero essere i limiti di Excel e quali difficoltà comporta l'adattamento del foglio alla nuove geometria.
Lo schema che ho pensato si rifa ad un traliccio piano per trasporto energia elettrico. Lo schema è totalmente inventato. Nella realtà il calcolo sarebbe inutile perché in genere si ha a che fare con tralicci tridimensionali, ma penso che a formulare un foglio per la risoluzione di tralicci tridimensionali non dovrebbe poi essere tanto difficoltoso.
Riporto lo schema assunto e a seguire i vari diagrammi.Attached Image
|
|
|
| .
|
-
|
| .
|
|
|
| |
Ecco invece lo schema delle aste: Attached Image
|
|
|
| .
|
35 replies since 14/9/2019, 19:51 5592 views
.


 .
.
 .
.


, (ma anche se non fosse un vettore di termini nulli, sarebbe comunque un vettore di termini noti come per esempio nel caso di cedimenti vincolari anelastici) le due equazioni si semplificano nelle seguenti: